Sondehunt
SondehuntAm 29.07.2019 hatte ich auf dem Rückweg vom Tomorrowland Festival in Belgien einen Abstecher zum KMI in Uccle organisiert, um dort meine zwei belgischen Ozonsonden zurückzubringen und mir das Institut und einen Ozonsondenstart anzuschauen.
Das KMI hat nun seit fast genau 50 Jahren eine kontinuierliche Ozonmessreihe aus Radiosondenaufstiegen. Aufstiege werden immer Mo., Mi. und Fr. um 11:30 UTC durchgeführt. Verwendet werden ECC Ozonsonden, auf die Mitte der 90er Jahre umgestellt wurde, zuvor wurden Brewer-Mast Sonden verwendet.
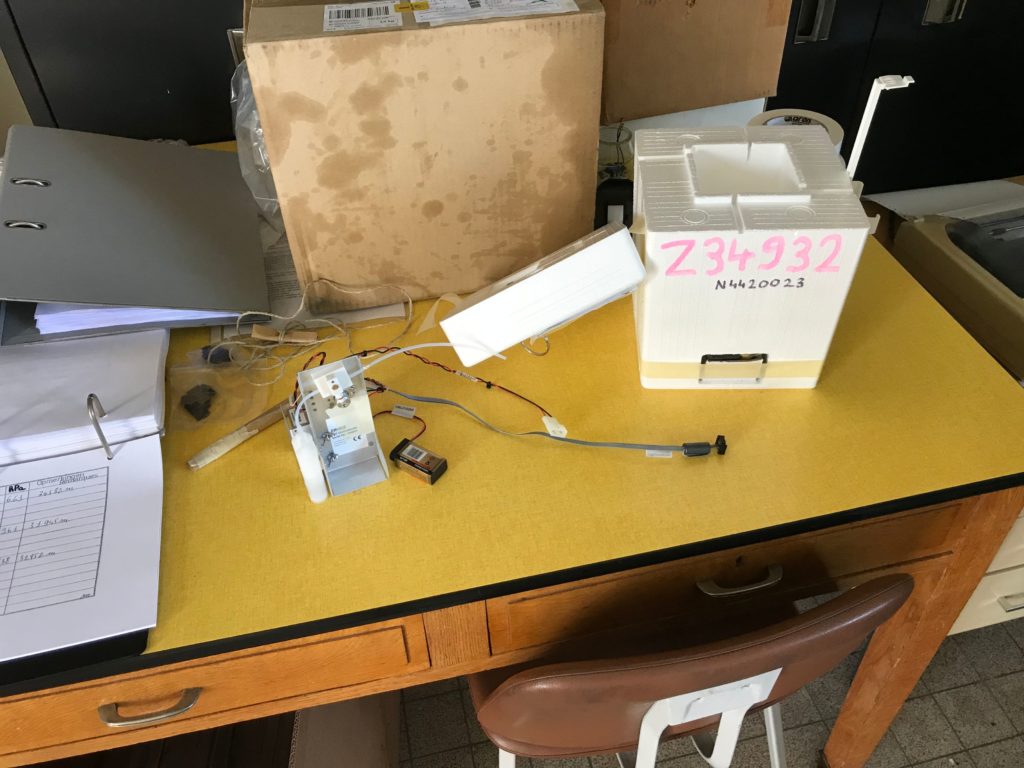
Grundsätzlich wird bei einer Ozonsondierung eine normale Radiosonde, hier eine Vaisala RS41 verwendet, an die die Ozonmesseinrichtung angeschlossen wird, die aus einer elektrochemischen Reaktionszelle, eine Sampling-Pumpe und einem Steuerboard und den notwendigen Batterien besteht, und in einer Styroporbox angeschlossen wird. Wem noch nicht bekannt, der sollte einen Blick auf die Anleitung zu Ozonsondierungen von Vaisala werfen, die sehr gut und ausführlich ist.
Die Vorbereitungen beginnen am Starttag mit der elektrochemischen Prüfung der Zelle ab 7:30 UTC. Wir erreichten das Institut gegen 9:00 UTC und wurden gleich zum Befüllen des Ballons mit in das Ballonhangar genommen. Verwendet werden 1200 g Ballons von Totex, die auf ein Gegengewicht von 2400 g mit Wasserstoff gefüllt werden. Das Wasserstofflager befindet sich ca. 30 m vom Ballonhangar entfernt und ist mit diesem über eine unterirdische Rohrleitung verbunden. Wenn das Füllvolumen erreicht ist (Der Ballon ist dann, trotz Wasserstofffüllung ein gutes Stück größer als ein normaler Heliumballon aus dem Startautomaten) wird der Ballon mit Kordel verschnürt und am Fallschirm befestigt. Der Ballon wird aus der Fülleinrichtung entfernt und an einem Gewicht befestigt, die Schnur zwischen Fallschirm und Sonde wird abgemessen und am Fallschirm angebracht.

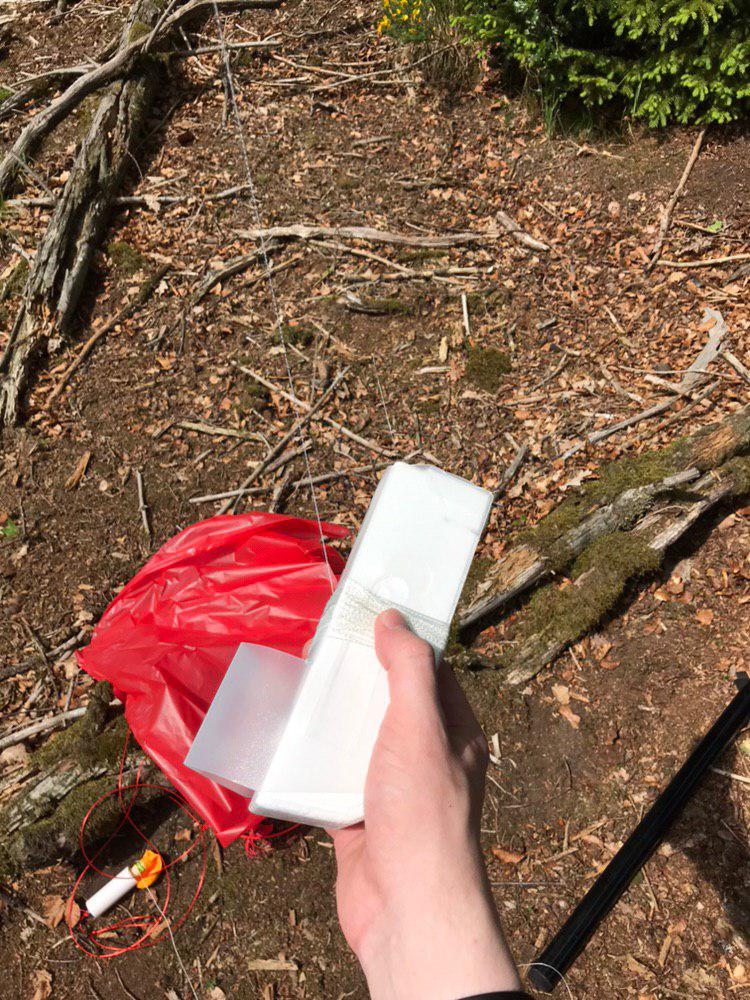
Anschließend ging es weiter in das Labor, in welchem die elektrochemischen Vorbereitungen durchgeführt werden, und welches sich im Keller des Instituts befindet. Hier befindet sich der Ozonsondenvorrat, und die Teststation. Während die Vorprüfung für den übernächsten Aufstieg erfolgte, wurden meine Sonden in Empfang genommen. Für die Mitarbeiter in Uccle ist es in Ordnung, wenn der Finder die Sonde öffnet, um das Packvolumen beim Zurücksenden zu reduzieren und die Batterien entfernt. Der Lufteinlassschlauch wird ebenfalls bei jedem Aufstieg ersetzt.
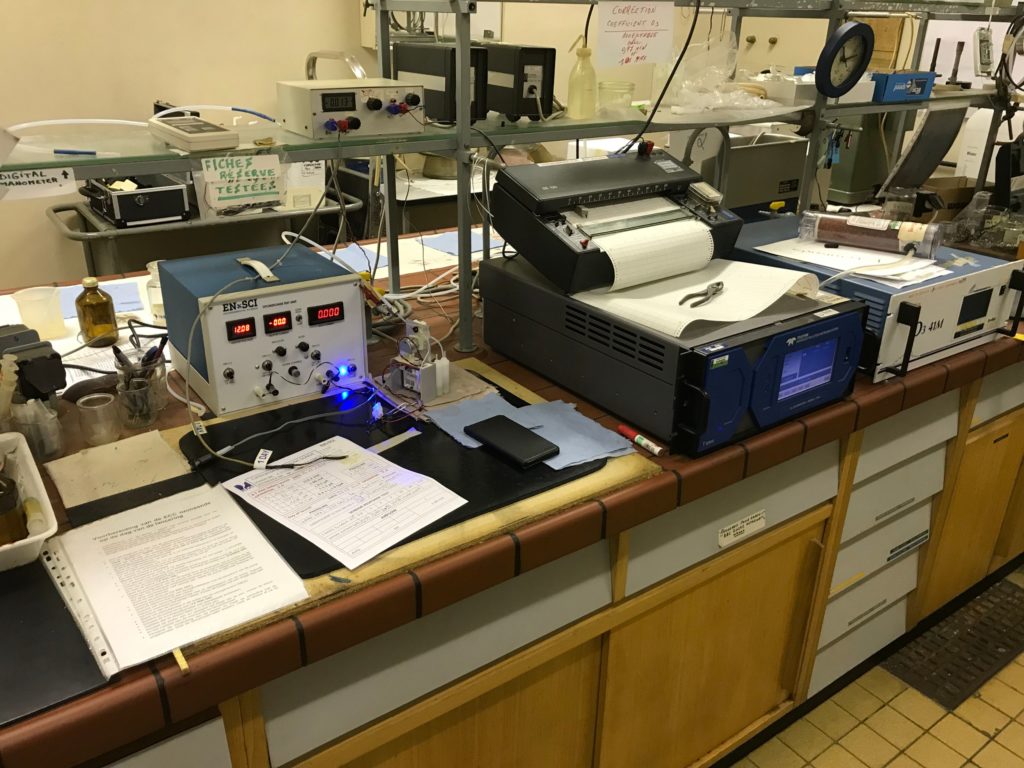
Die elektrochemische Teststation wie im Vaisal-Manual beschrieben 
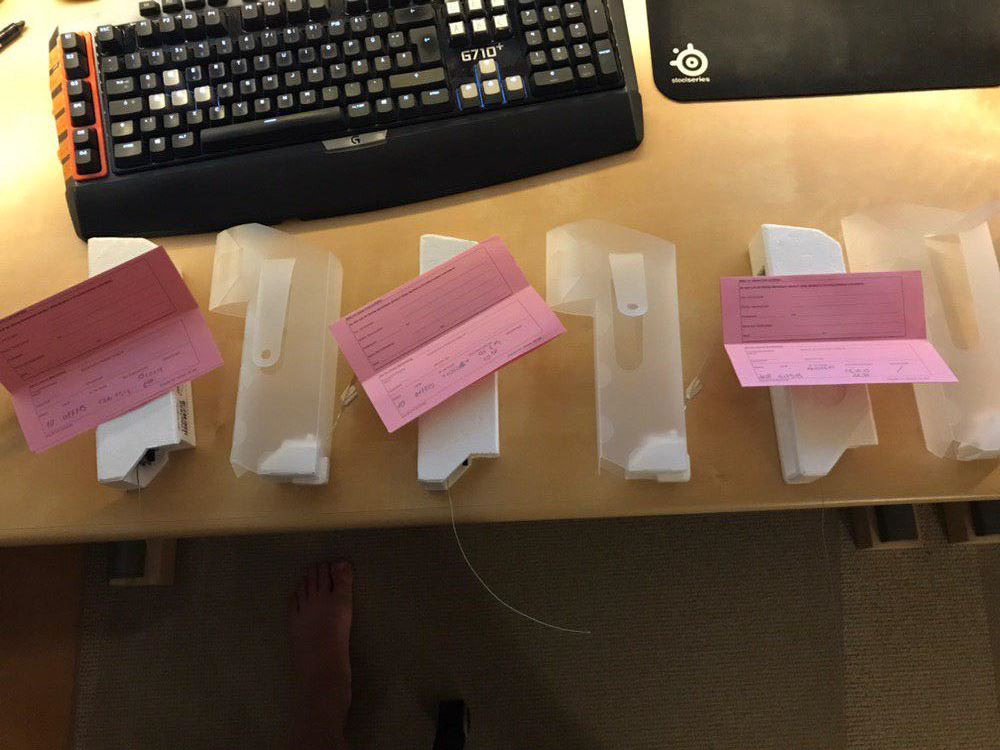
Der Vorrat an Ozonsonden. Am Besuchstag wurde eine neue Sonde gestartet, die Rücklaufquote liegt bei etwa 40%
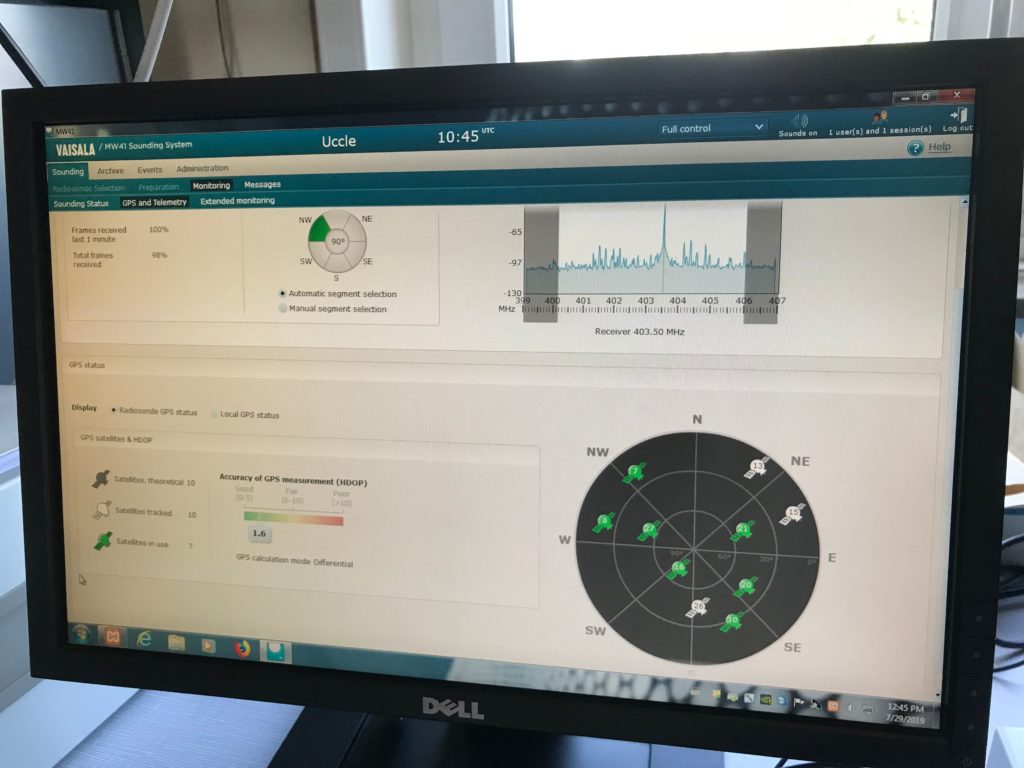
Weiter ging die Tour auf dem Dachboden, wo die Empfangsstation und der Groundcheck untergebracht sind. Hier erhielt ich die Gelegenheit, ein paar mitgebrachte Sonden auf eine andere Frequenz zu programmieren.

Telemetrie- und GPS-Antenne. Auch das alte Radom aus RS80/90-Zeiten steht noch auf dem Dach 
Das Groundcheck-Setup aus älterem SPS311, GI41 und PC mit MW41 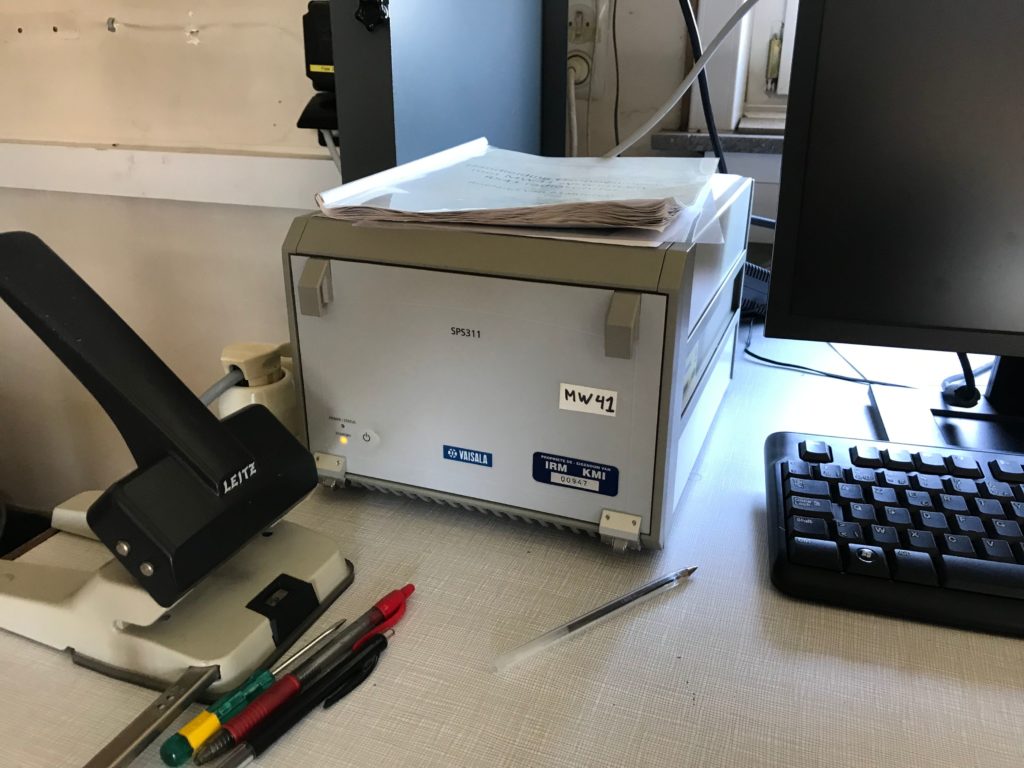
Die älteren SPS311 waren im April von dem GPS-Rollover Fehler betroffen, in Uccle fiel für 2 Wochen Starts aus 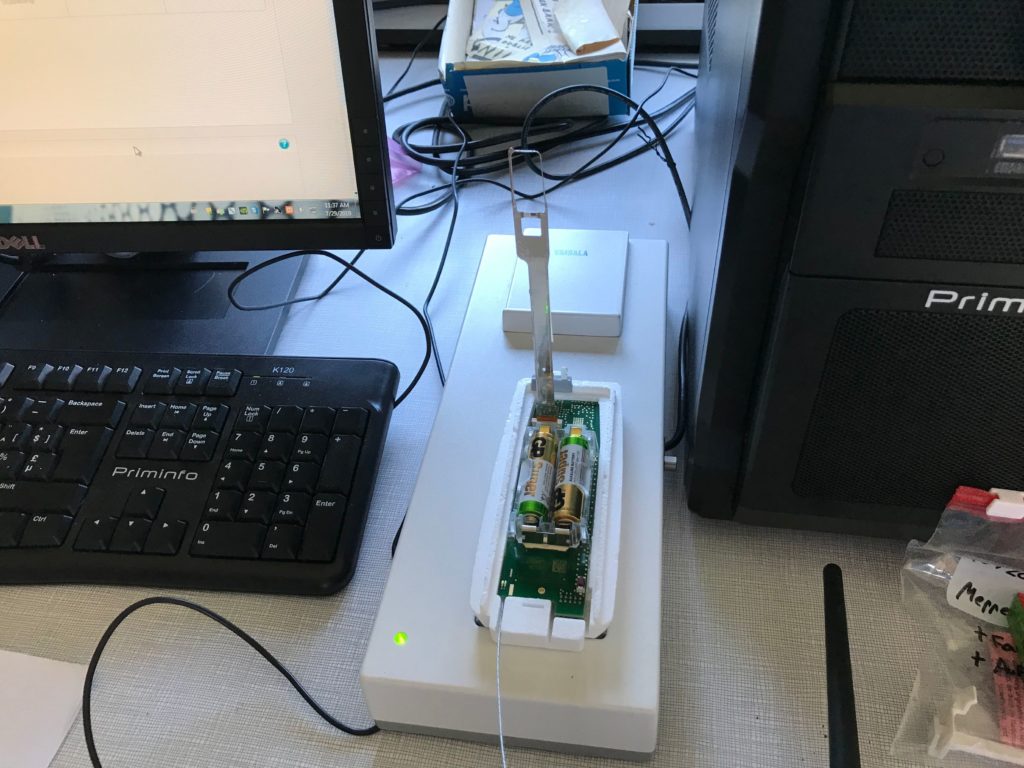
Das RI41 hat vermutlich auch vorher noch keine RS41 “oben ohne” gesehen 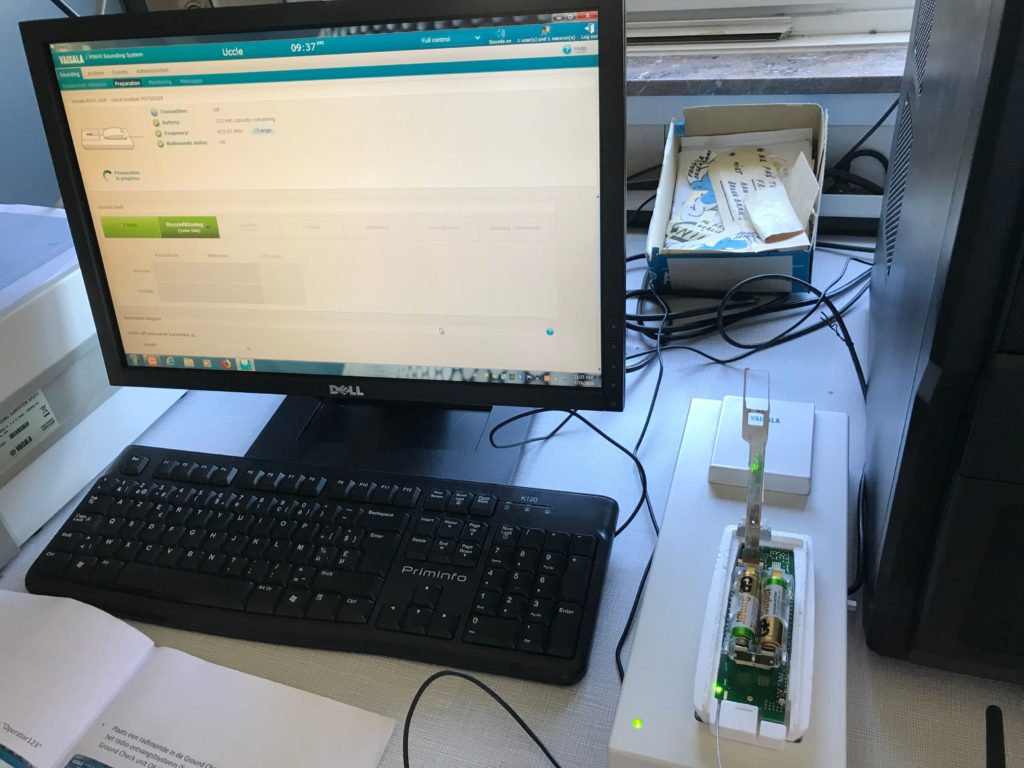
Mit 3 RS41 auf ziviler Frequenz steht den ersten Sondenaufstiegen in Gummersbach nichts mehr im Wege
Circa 1 h vor dem Start wird die Ozonsonde für den Groundcheck nach oben geholt. Die Heizbatterie wird angebracht und die Motorbatterie im Batteriefach verklebt. Da Vaisala keine Wasserbatterien mehr vertreibt, ist Uccle im Frühjahr als eine der letzten Stationen auf Lithiumbatterien umgestiegen. Von Vaisala werden anstatt der Wasserbatterie nun 2 9V Lithiumblöcke bereitgestellt, die bereits in Reihe verschaltet, mit dem korrekten Stecker und verklebt geliefert werden.
Eine Radiosonde wird ausgepackt und auf das Groundcheck-Device gelegt. Nachdem der Groundcheck abgeschlossen ist, und die Korrekturwerte für die Ozonsonde in MW41 eingegeben wurden, wird die Radiosonde an der Ozonsonde befestigt. Der Motor wird eingeschaltet und der Motorstrom kontrolliert. Nun wird noch einmal Ozon auf die Sonde gegeben und der Messauschlag geprüft, bevor der Motor wieder ausgeschaltet wird. Anschließend wird die Sonde auf das Dach gebracht, um den GPS-Fix zu beziehen. Die Papierdokumentation der Sonde wird in ein Online-Formular eingetragen und zusammengeheftet. Die Sonde wird fertig zugeklebt.
Die Heizbatterie wird angeschlossen und befestigt 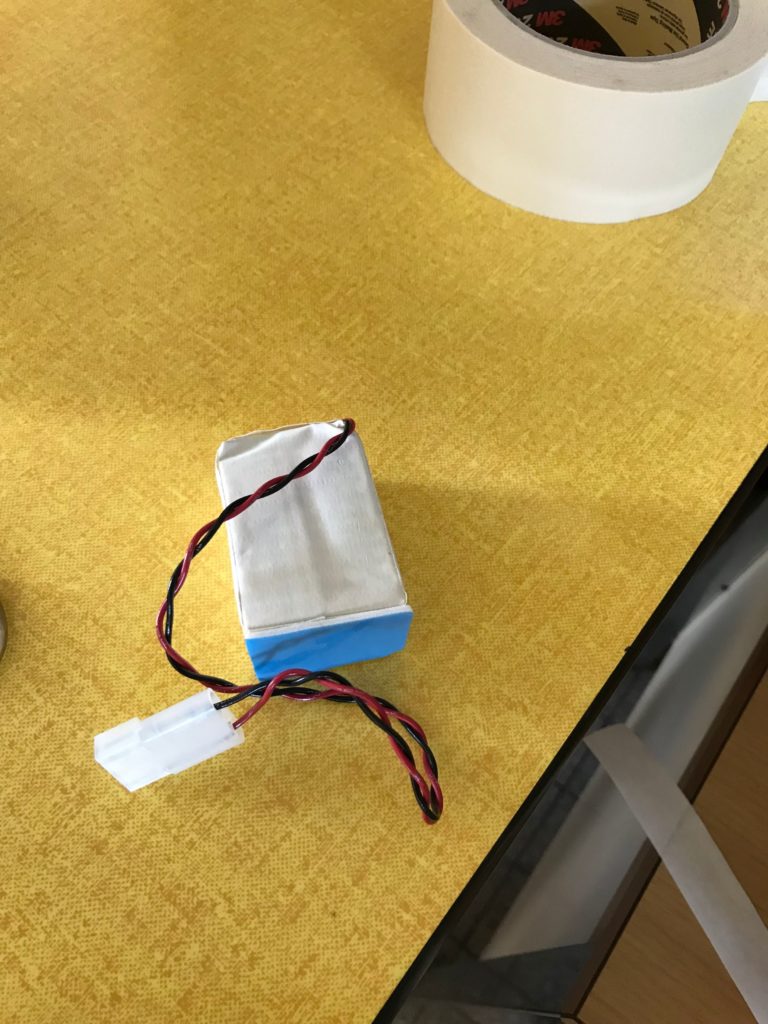
Ersatz für die Wasserbatterien, wie Vaisala ihn ausliefert 
Die Kiste hätte ich auch gerne zuhause 
Die Ozonsonde ist fast fertig 
Verschnürt und nach dem Groundcheck, 30 Min. bis zum Start 
Die Sonde holt sich den GPS Fix
15 Min. vor dem Start werden die Werte der Bodenwetterstation in MW41 eingetragen und in der Dokumentation ergänzt. Die Sonde wird in das Ballonhangar gebracht und mit beiden Schnüren (eine dient zur Verbesserung der Flugstabilität) mit der langen Schnur zum Fallschirm verknotet.
guter GPS-Fix 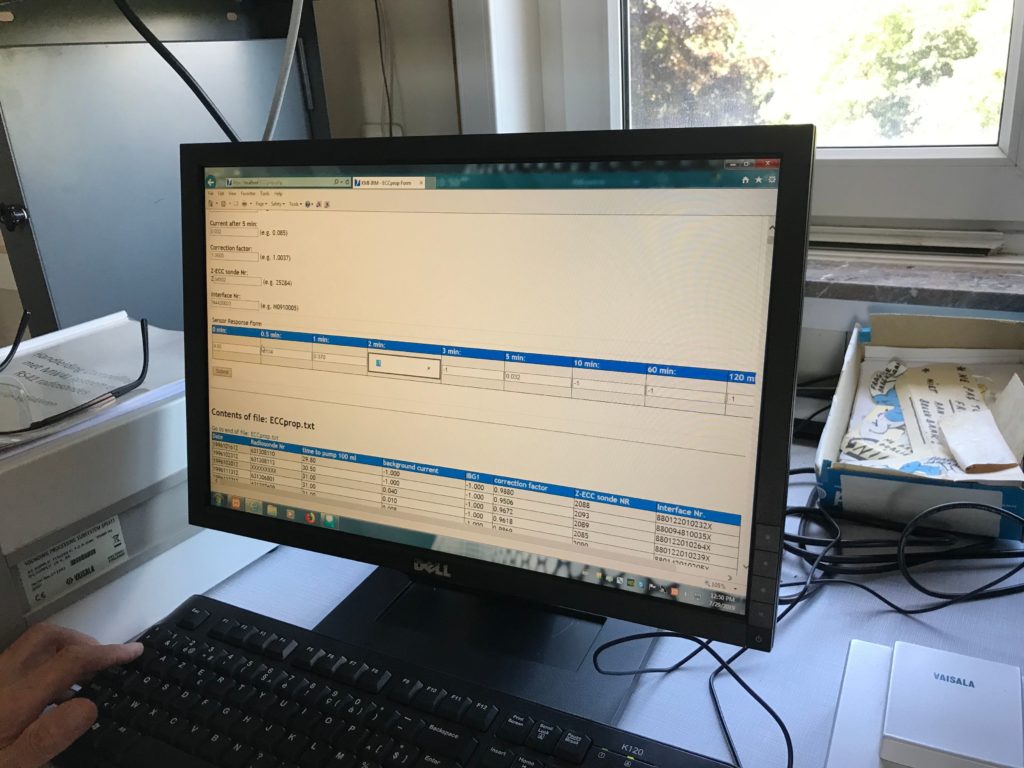
interne Doku 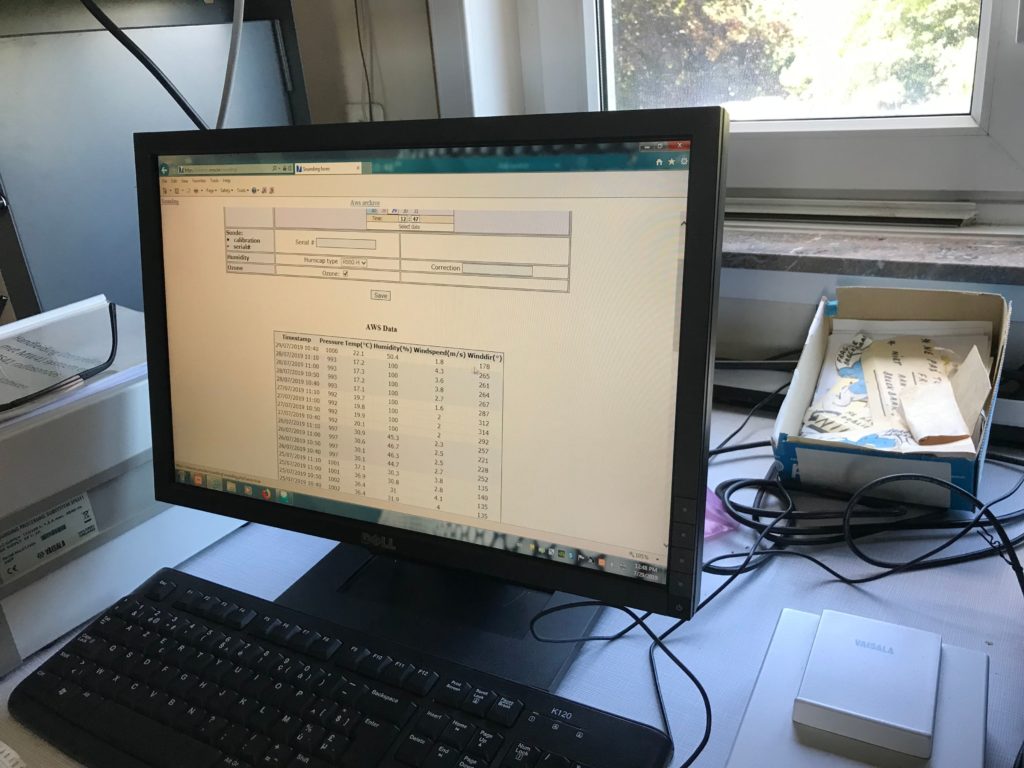
in verschiedenen 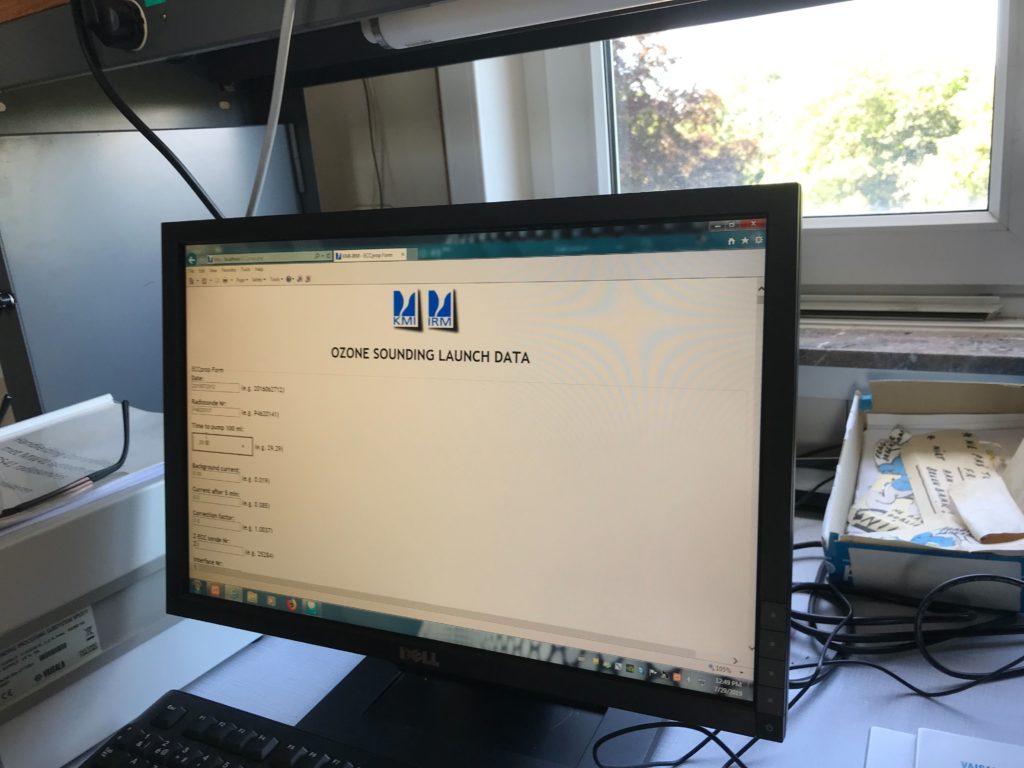
Weboberflächen
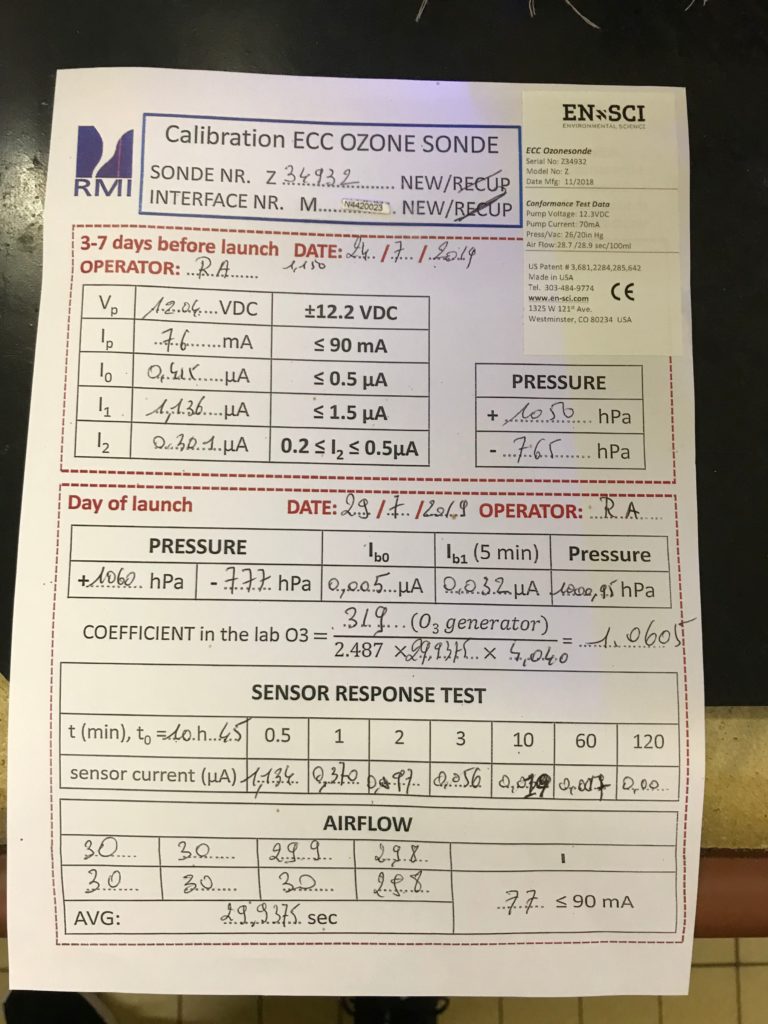
Dokumetation der Kalibration der Sonde vor dem Start 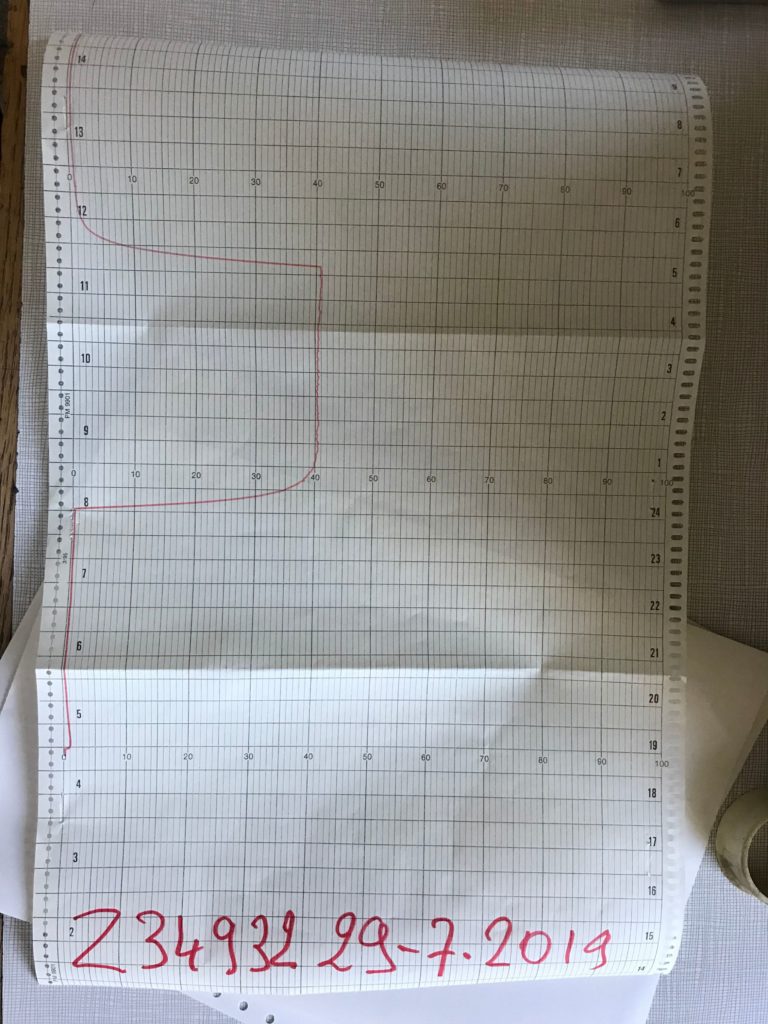
ein echter Plotterausdruck zeigt die Antwort des Sensors beim Test mit Ozon 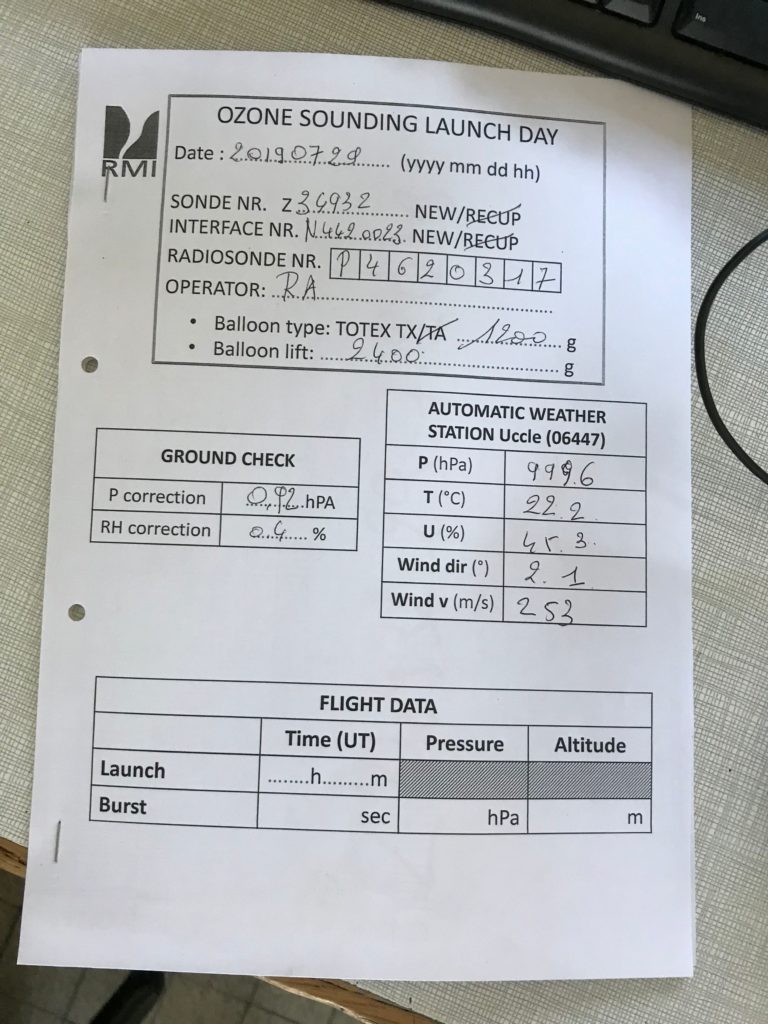
Dokumentation am Starttag
Ein zweiter Mitarbeiter geht nun mit der Sonde aus dem Hangar, und das Gespann wird zu einer nahen Wiese gebracht. Der Ballon wird Stück für Stück aufgelassen. Nun kam mein Moment: ich durfte die Sonde festhalten und warten, bis der Aufstiegszeitpunkt gekommen war. Dann entließ ich die Sonde auf ihre Reise, die sie bis westlich von Antwerpen geführt hat.

fertiges Austiegsgespann 
Das Ballonhangar ist nun auch geöffnet 
Und ich darf die Sonde starten! 
Da fliegt sie, und man kann sie noch mehrere Minuten sehen
Ich bedanke mich ganz herzlich bei Roger Ameloot, Roeland van Malderen und dem ganzen Team des KMI, die mir diesen tollen Einblick in ihre Arbeit ermöglicht haben!